-
簡介
-
硬體
-
系統設置
-
攝影機校正
-
在 Unreal Engine 上即時合成
-
常見問題集
在 Mars 上啟用 FreeD 並將 Mars 新增至 Aximmetry
FreeD 是相機使用的業界標準通訊協定,可將轉換、旋轉、對焦及縮放等追蹤資料直接傳送到虛擬製片系統。
其允許製片系統在無需額外硬體的情況下,將逼真的虛擬攝影棚結合到製片中。
以下說明如何在 Mars 上啟用 FreeD 並將 Mars 新增至 Aximmetry:
-
在 Mars 主控台上,點選 Settings 並檢查韌體版本。確認您已安裝 Mars 韌體 2.03.999.1 或更新版本。
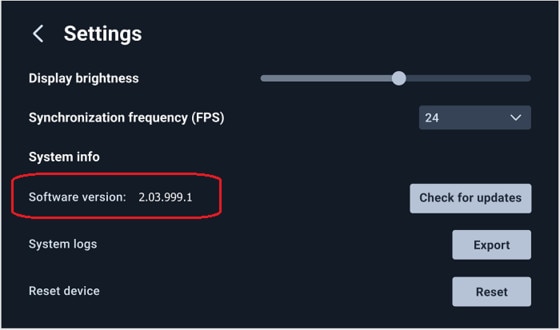
有關如何更新韌體的詳細資訊,請參閱手動更新 Mars 韌體。
-
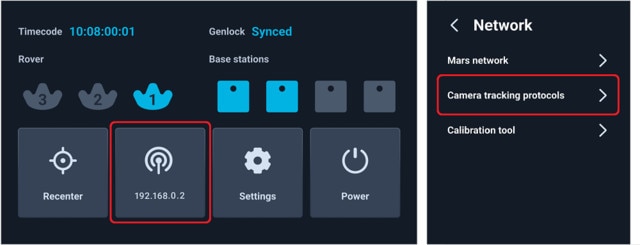
在 Mars 主控台上,點選 Network (或在網路處於使用中狀態時點選 Mars IP),然後點選 Camera tracking protocols。
-
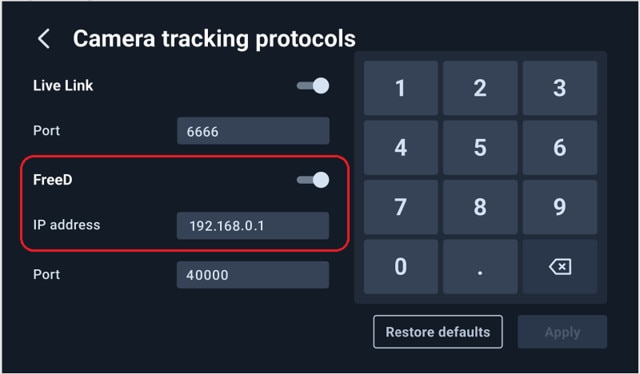
開啟 FreeD 並輸入電腦的 IP 位址。
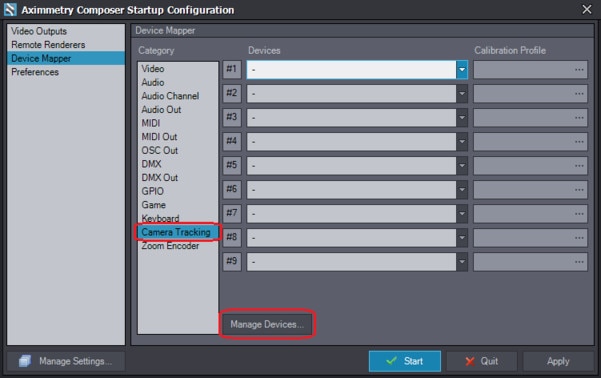
- 在電腦上啟動 Aximmetry。 隨後將顯示啟動設定視窗。
- 按一下左側窗格的 Device Mapper。
-
在類別底下,選取 Camera Tracking,然後按一下 Manage Devices。
-
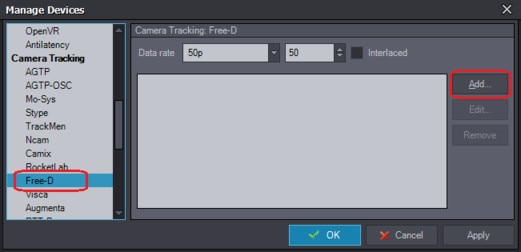
在 Manage Devices 對話方塊中,選取 Camera Tracking 底下的 Free-D,然後按一下 Add。
隨後將顯示 Add Device 對話方塊。
-
在 UDP port 欄位中,輸入出現在 Mars 主控台 Camera tracking protocols 畫面上 FreeD 底下顯示的連接埠號碼。
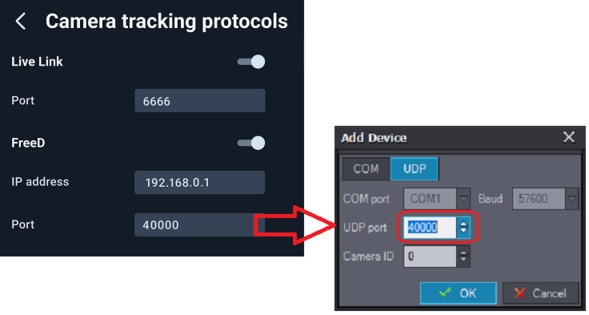
- 在 Camera ID 欄位中,選取 1,以便將其與 Mars 中 Rover 1 的乙太網路連接埠建立關聯,然後按一下 OK。
-
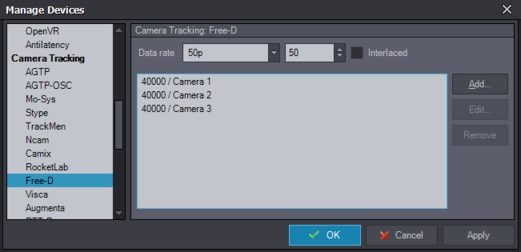
重複步驟 7 至 9,以新增 Rover 2 和 Rover 3。在 Camera ID 欄位中,分別選取 2 和 3。
這對您有幫助嗎?
是
否
送出
感謝您!您的意見回報可協助他人查看最實用的資訊。