-
簡介
-
硬體
-
系統設置
-
攝影機校正
-
在 Unreal Engine 上即時合成
-
常見問題集
Rover
Rover 將追蹤資料從
VIVE 移動定位器 (3.0) 傳送到
Mars。
Rover 作為 VIVE 移動定位器 (3.0) 傳送的追蹤資料樞紐,防止傳送至 Mars 的訊號衰減。
Rover 也支援將鏡頭旋轉編碼器所產生的 FIZ (focus, iris, zoom) 資料傳輸給虛擬製片軟體來使用。VIVE Mars CamTrack 支援使用 LOLED Indiemark lens encoder (鏡頭旋轉編碼器)。
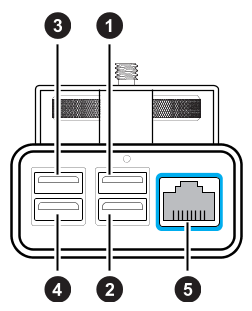
| 1 | USB Type-A 連接埠 1 | VIVE 移動定位器 (3.0)主要連接埠 |
| 2 | USB Type-A 連接埠 2 | Zoom 資料經由此連接埠傳輸 |
| 3 | USB Type-A 連接埠 3 | Focus 資料經由此連接埠傳輸 |
| 4 | USB Type-A 連接埠 4 | Iris 資料經由此連接埠傳輸 |
| 5 | 乙太網路連接埠 | 將 Rover 連接至 Mars 以傳輸追蹤資料 |
這對您有幫助嗎?
是
否
送出
感謝您!您的意見回報可協助他人查看最實用的資訊。