카메라 보정 도구를 사용하여 보정 데이터 수집하기
카메라 보정 도구에서는 카메라를 보정하기 위해 이미지를 캡처하여 가상 프로덕션 엔진으로 가져올 수 있는 보정 데이터를 생성합니다.
카메라 보정 도구를 다운로드하지 않은 경우 www.vive.com/mars/cct를 방문하십시오.
-
Rover의 앞면을 카메라 렌즈와 평행하게 하여 Rover 모듈을 카메라에 부착합니다.
 메모: Rover 하단의 내부 나사산 깊이는 5.5mm입니다. 설치 중에 Rover 또는 카메라가 손상되지 않게 하려면 카메라의 외부 나사산이 4.5mm보다 더 길지 않게 하십시오.
메모: Rover 하단의 내부 나사산 깊이는 5.5mm입니다. 설치 중에 Rover 또는 카메라가 손상되지 않게 하려면 카메라의 외부 나사산이 4.5mm보다 더 길지 않게 하십시오. -
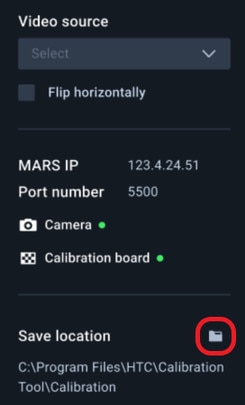
PC에서 카메라 보정 도구를 열고 Mars IP 및 포트 번호를 입력한 후 Connect을 클릭합니다.

-
Video source 드롭다운 메뉴에서 동영상 캡처 장치를 선택합니다.
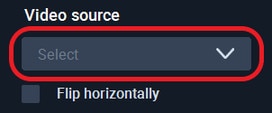
팁: 비디오 피드가 x 축을 기준으로 반전될 경우 Flip horizontally를 선택하여 수정할 수 있습니다.
-
Save location의 경우 폴더 아이콘
 을 클릭하고 이미지 및 보정 데이터의 목적지 폴더를 선택합니다.
을 클릭하고 이미지 및 보정 데이터의 목적지 폴더를 선택합니다.
-
체스판 패턴이 빨간색 프레임 안에 들어가도록 카메라를 움직입니다.
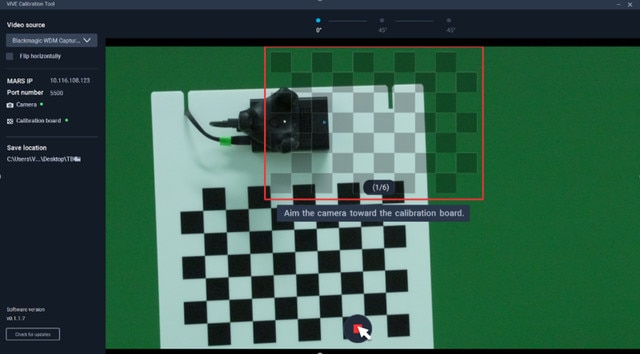
프레임이 파란색으로 바뀌고 카메라 보정 도구가 이미지를 캡처합니다.
-
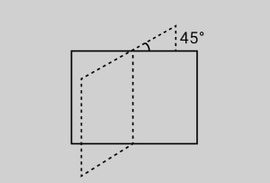
보정 보드를 반시계 방향으로 45도 회전하고 Continue을 클릭한 후 두 번째 이미지 세트를 캡처합니다.
두 번찌 이미지 세트를 캡처한 후에는 보드를 반대 방향으로 45도 돌리라는 메시지가 표시됩니다.
-
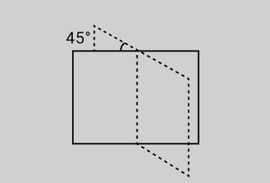
보정 보드를 시계 방향으로 45도(-45도) 회전하고 Continue을 클릭한 후 세 번째이자 마지막 이미지 세트를 캡처합니다.
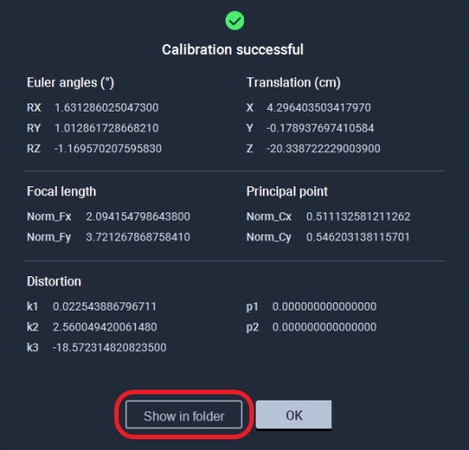
카메라 보정 도구에서 이미지를 처리한 후 결과를 표시합니다. Show in folder를 클릭하여 이미지 및 보정 데이터가 포함된 저장 위치를 엽니다.
이 항목이 도움이 되었나요?
예
아니오
감사합니다! 귀하의 피드백은 다른 사람들이 가장 도움이 되는 정보를 보는 데 도움이 됩니다.