カメラ校正ツールを使ってキャリブレーションデータを収集する
カメラ校正ツールで画像を取り込み、キャリブレーションデータを生成し、バーチャルプロダクションエンジンンにインポートして、カメラをキャリブレーショ ンすることができます。
カメラ校正ツールをダウンロードされていない場合は、www.vive.com/mars/cctにアクセスしてください。
-
Roverモジュールをカメラに取り付け、Roverの前面がカメラのレンズと平行になるようにします。
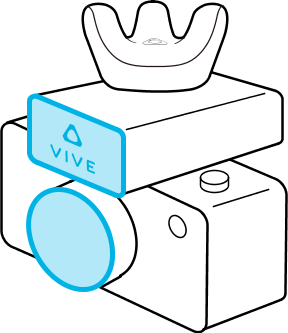 注意: Rover底面にある内ネジの深さは5.5mmです。設置中に、Roverやカメラを損傷しないよう、カメラ外側のネジ山が4.5mm以下であることを確認してください。
注意: Rover底面にある内ネジの深さは5.5mmです。設置中に、Roverやカメラを損傷しないよう、カメラ外側のネジ山が4.5mm以下であることを確認してください。 -
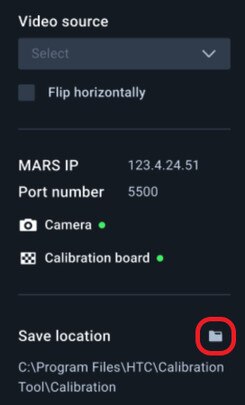
PCで、カメラ校正ツールを開き、Mars IPとポート番号を入力し、Connectをクリックします。

-
Video sourceドロップダウンメニューから、ビデオキャプチャデバイスを選択します。
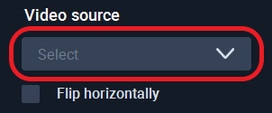
ヒント: ビデオフィードがX軸で反転している場合は、Flip horizontallyを選択して修正することができます。
-
Save locationは、フォルダアイコン
 をクリックして、画像とキャリブレーションデータの保存先フォルダを選択します。
をクリックして、画像とキャリブレーションデータの保存先フォルダを選択します。
-
チェス盤のパターンが赤枠の中に入るようにカメラを移動させます。
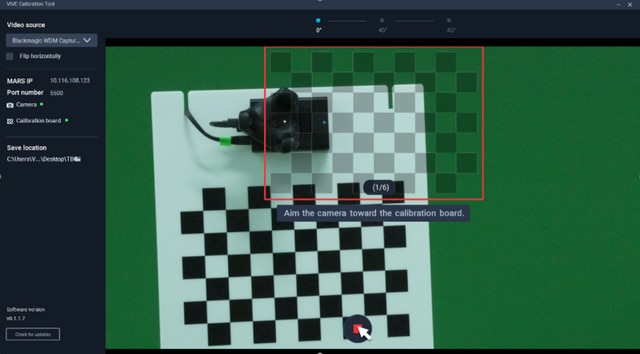
フレームが青に変わり、カメラ校正ツールが画像が取り込みます。
-
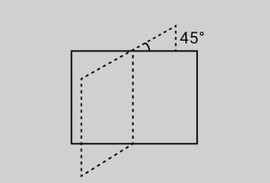
キャリブレーションボードを45度(反時計回り)回転させ、Continueをクリックし、2セット目の画像を取り込みます。
2セット目の画像を取り込んだ後、ボードを反対方向に45度回転させるよう指示されます。
-
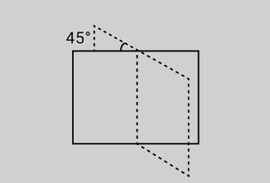
キャリブレーションボードを時計回りに45度(-45度)回転させ、Continueをクリックして、3セット目の最終画像を取り込みます。
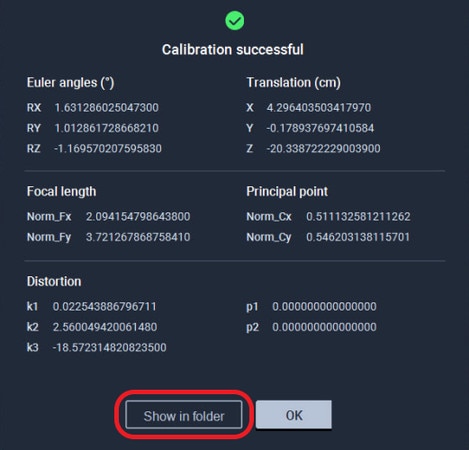
カメラ校正ツールが画像を処理し、結果を表示します。Show in folderをクリックすると、画像とキャリブレーションデータの保存先が表示されます。
参考になりましたか?
はい
いいえ
ありがとうございました!フィードバックをいただければ、お役立ち情報の提供を改善してまいります。