Collecting calibration data using the Camera Calibration Tool
The
Camera Calibration Tool captures images to generate calibration data that you can import into your virtual production engine to calibrate your camera.
If you haven't downloaded the Camera Calibration Tool, visit www.vive.com/mars/cct.
-
Attach a
Rover module to your camera, with the front side of
Rover parallel to the camera lens.
 Note: The internal screw thread on the bottom of Rover has a depth of 5.5 mm. To avoid damaging Rover or your camera during installation, make sure the exterior screw thread on your camera is no longer than 4.5 mm.
Note: The internal screw thread on the bottom of Rover has a depth of 5.5 mm. To avoid damaging Rover or your camera during installation, make sure the exterior screw thread on your camera is no longer than 4.5 mm. -
On your PC, open the
Camera Calibration Tool, enter the
Mars IP and port number, and then click
Connect.

-
Select your video capture device from the
Video source dropdown menu.
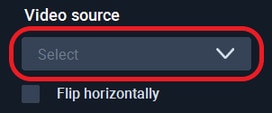
Tip: If the video feed is inverted on the x-axis, you can select
Flip horizontally to correct it.
-
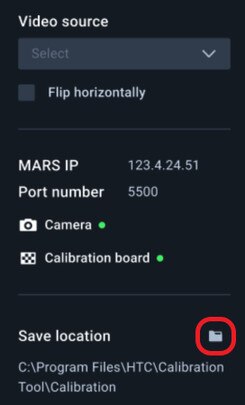
For
Save location, click the folder icon
 and select a destination folder for the images and calibration data.
and select a destination folder for the images and calibration data.
-
Move the camera so the chessboard pattern falls inside the red frame.
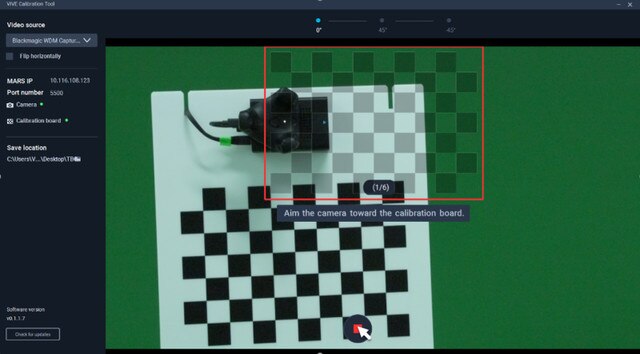
The frame will turn blue, and the Camera Calibration Tool will capture an image.
-
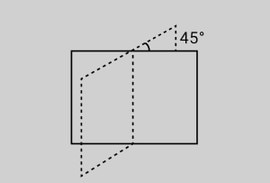
Rotate the calibration board 45 degrees (counterclockwise), then click
Continue and capture a second set of images.
After capturing the second set of images, you'll be prompted to rotate the board 45 degrees in the opposite direction.
-
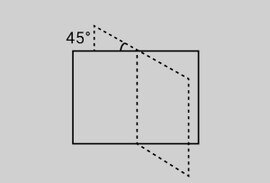
Rotate the calibration board 45 degrees clockwise (-45 degrees), click
Continue, and then capture the third and final set of images.
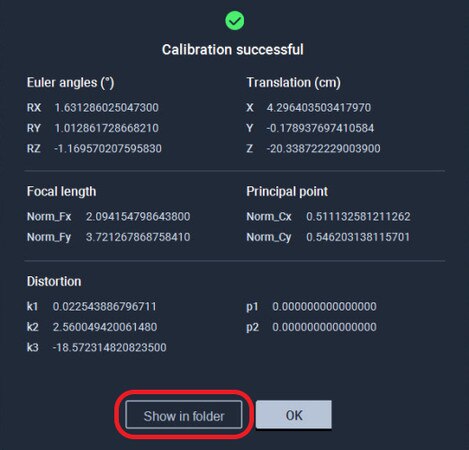
The Camera Calibration Tool will process the images and display the results. Click Show in folder to open the save location containing the images and calibration data.
Was this helpful?
Yes
No
Thank you! Your feedback helps others to see the most helpful information.