-
简介
-
硬件
-
系统设置
-
摄影机校准
-
Unreal Engine 中的实时合成
-
常见问题
使用相机校准工具收集校准数据
相机校准工具拍摄图像以生成校准数据,您可以将其导入虚拟制片引擎以校准您的摄影机。
若尚未下载相机校准工具,请访问 www.vive.com/mars/cct。
-
将 Rover 模块安装到摄影机,并使 Rover 的正面与摄影机镜头平行。
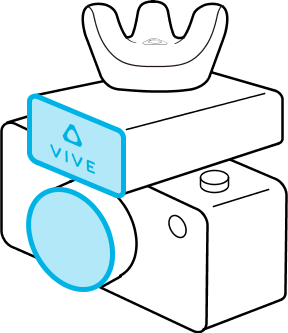 注: Rover 底部的内螺纹深度为 5.5 毫米。为避免在安装过程中损坏 Rover 或摄影机,请确保摄影机上的外螺纹不超过 4.5 毫米。
注: Rover 底部的内螺纹深度为 5.5 毫米。为避免在安装过程中损坏 Rover 或摄影机,请确保摄影机上的外螺纹不超过 4.5 毫米。 -
在电脑上,打开相机校准工具,输入 Mars IP 和端口号,然后单击 Connect。

-
从 Video source 下拉菜单中选择视频拍摄设备。
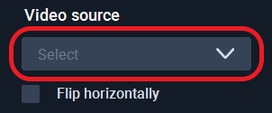
提示: 如果视频源在 x 轴上翻转,您可以选择 Flip horizontally 来纠正。
-
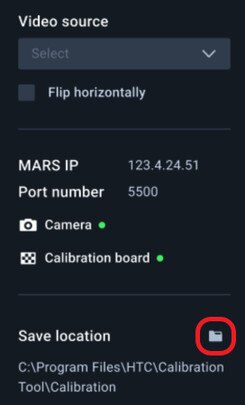
对于 Save location,请单击文件夹图标
 并选择图像和校准数据的目标文件夹。
并选择图像和校准数据的目标文件夹。
- 单击播放按钮开始校准过程。
-
移动摄影机,使棋盘图案落入红框内。
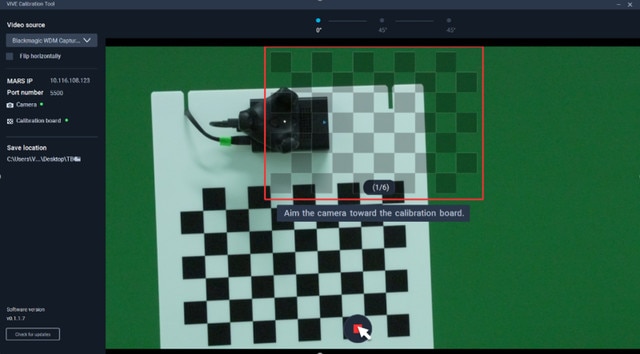
方框将变为蓝色,相机校准工具将拍摄图像。
- 根据需要移动摄影机以拍摄更多图像,直至系统提示您旋转校准板。
-
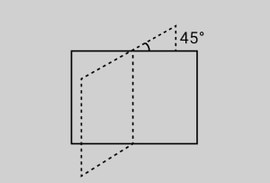
将校准板旋逆时针旋转 45 度,然后单击 Continue 并拍摄第二组图像。
拍摄第二组图像后,系统会提示您将校准板朝相反方向旋转 45 度。
-
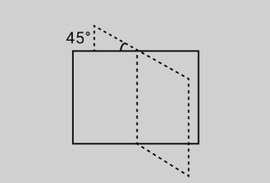
将校准板顺时针旋转 45 度(-45 度),单击 Continue,然后拍摄第三组也是最后一组图像。
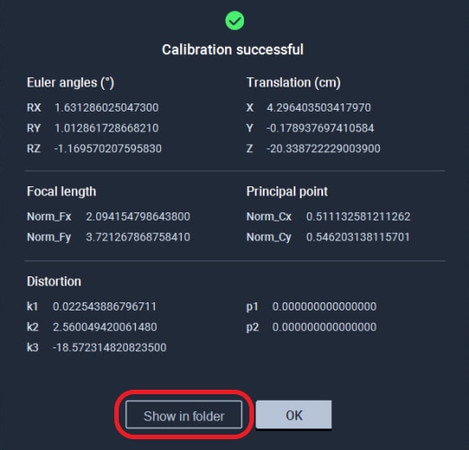
相机校准工具将处理图像并显示结果。单击 Show in folder 以打开包含图像和校准数据的保存位置。
-
将校准数据导入虚拟制片引擎以校准摄影机。
有关详细信息,请参见将校准数据导入 Unreal Engine。
此内容对您有帮助吗?
是
否
提交
谢谢!您的反馈可以帮助其他人了解最有用的信息。