-
简介
-
硬件
-
系统设置
-
摄影机校准
-
Unreal Engine 中的实时合成
-
常见问题
在 Mars 上启用 FreeD 并将 Mars 添加到 Aximmetry
FreeD 是摄影机使用的行业标准协议,用于将追踪数据(例如变换、旋转、对焦和变焦)直接发送到虚拟制片系统。
其允许制片系统在无需额外硬件的情况下,将逼真的虚拟摄影棚合入制片中。
以下是在 Mars 上启用 FreeD 并将 Mars 添加到 Aximmetry 的方法:
-
在 Mars 主控面板上,点击 Settings 并检查固件版本。确保您已安装了 Mars 固件 2.03.999.1 或更高版本。
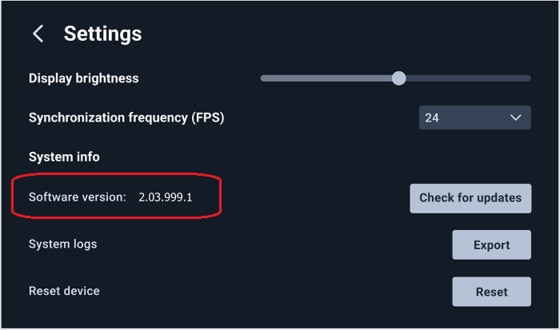
有关如何更新固件的详细信息,请参见手动更新 Mars 固件。
-
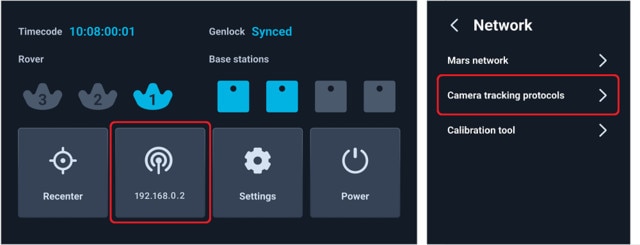
在 Mars 主控面板上,点击 Network(或在网络处于活跃状态时点击 Mars IP ),然后点击 Camera tracking protocols。
-
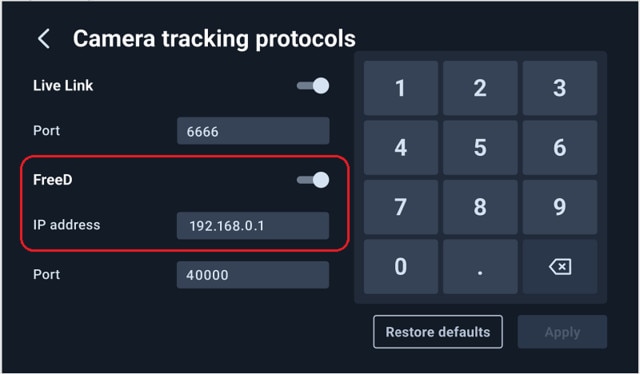
打开 FreeD 并输入电脑 IP 地址。
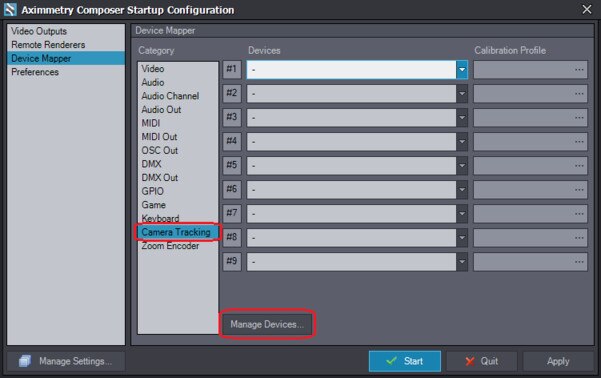
- 在电脑上,启动 Aximmetry。 随后将显示 Startup Configuration 窗口。
- 单击左侧窗格中的 Device Mapper。
-
在 Category 下,选择 Camera Tracking,再单击 Manage Devices。
-
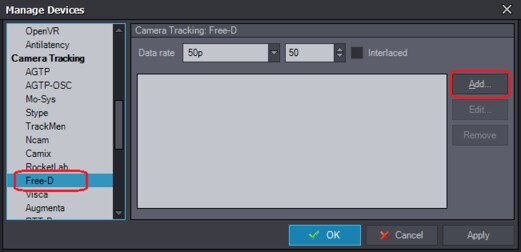
在 Manage Devices 对话框中,选择 Camera Tracking 下的 Free-D,然后单击 Add。
随后将显示 Add Device 对话框。
-
在 UDP port 字段中,输入出现在 Mars 主控面板 Camera tracking protocols 屏幕上 FreeD 下显示的端口号。
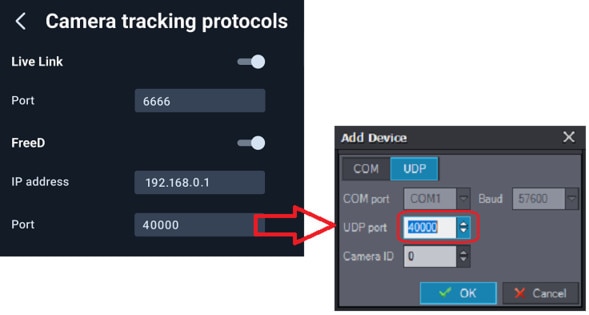
- 在 Camera ID 字段中,选择 1 以将其与 Mars 上 Rover 1 的以太网端口相关联,然后单击 OK。
-
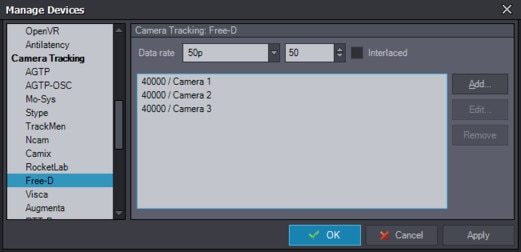
重复步骤 7 到 9,以添加 Rover 2 和 Rover 3。在 Camera ID 字段中,分别选择 2 和 3。
此内容对您有帮助吗?
是
否
提交
谢谢!您的反馈可以帮助其他人了解最有用的信息。